



SMAUG #tech-Tech Unveiled: High Resolution Sonar Inspection
SMAUG’s WP4 (Work Package 4) is focused on the underwater detection and location of potential threats such as underwater vehicles, structures, or anomalous devices. This detection and location will be performed using four primary methods:
i) Acoustic Detection ii) Rapid Sonar Hull Scan iii) High Resolution Sonar Inspection iv) Collective Autonomous Location
In this blog article we will further explore the High-Resolution Sonar Inspection. What is the methodology behind this technology? And how this technology will be applied and integrated into the SMAUG project?
Embark on this journey to explore SMAUG’s tech!
High Resolution Sonar Inspection
Method: Employs high-resolution imaging sonar system to perform detailed inspections of objects in waters with poor visibility, in particular objects on ships’ hulls.
Application: Allows detailed inspection of underwater objects to accurately identify potential threats.
But what is a High-resolution imaging sonar system?
A sonar is a sensor that uses acoustic signals to do measurements, and this is highly efficient in muddy, poor visibility conditions. The sonar sends out acoustic signal and listens to the sound reflection. Based on the time it took for the signal to come back, the sonar calculates the object’s distance. In the SMAUG project multibeam sonar is used which means that the sonar sends out 512 acoustic signals to gather more datapoints and get a better picture of the object that it is looking at. These beams are sent out close to each other at high, up to 3MHz frequency. The large number of high frequency acoustic beams creates a high-resolution acoustic image that could have a resolution of up to 2mm per pixel. Such multibeam imaging sonars are a great addition to cameras at locating and identifying objects underwater, especially near ships that stir the water up and reduce visibility.
In the SMAUG project, our partners from Vete Engineering, are leading the high-resolution sonar inspection task with the goal to locate and identify strange objects on ship hulls. In order to perform this task, Vete Engineering has built an unmanned underwater vehicle that is tethered to an unmanned surface vessel and controlled from the shore. The underwater vehicle can dive to a specific coordinate and is equipped with different cameras and a multibeam sonar which data is compared and fused together to provide the best possible overview of the inspected object.
Sounds fascinating?
Find below an Image of the sonar output looking at a human hand to have a clearer picture of the technology described!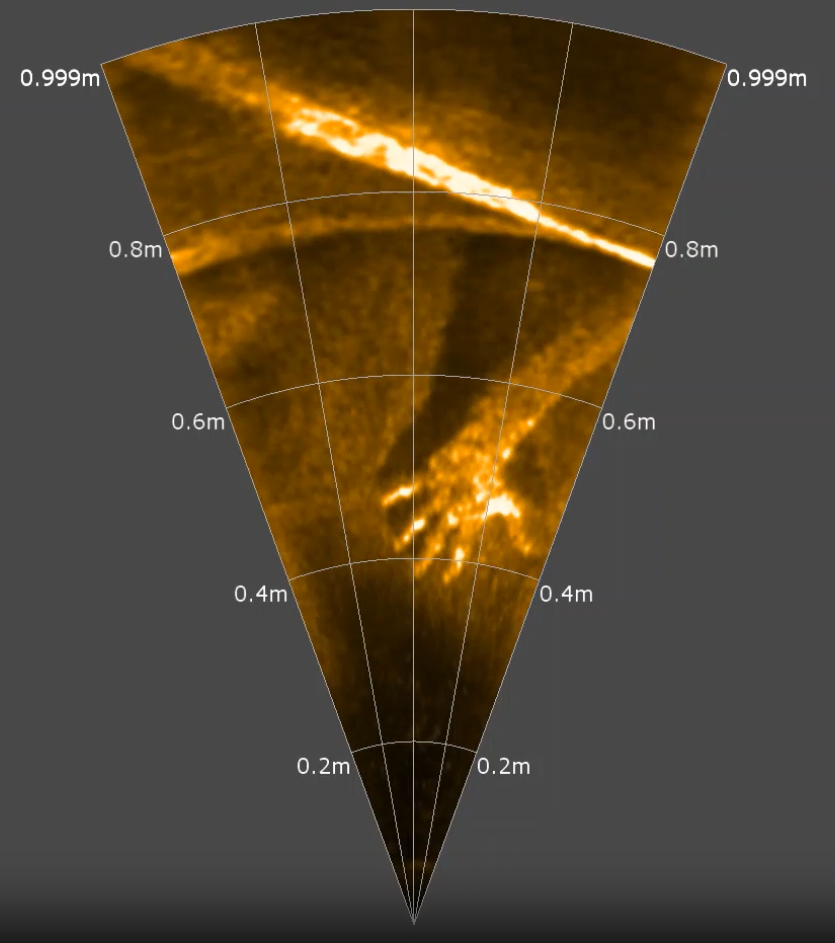
And below is the Robot test platform where the sonar will be mounted on.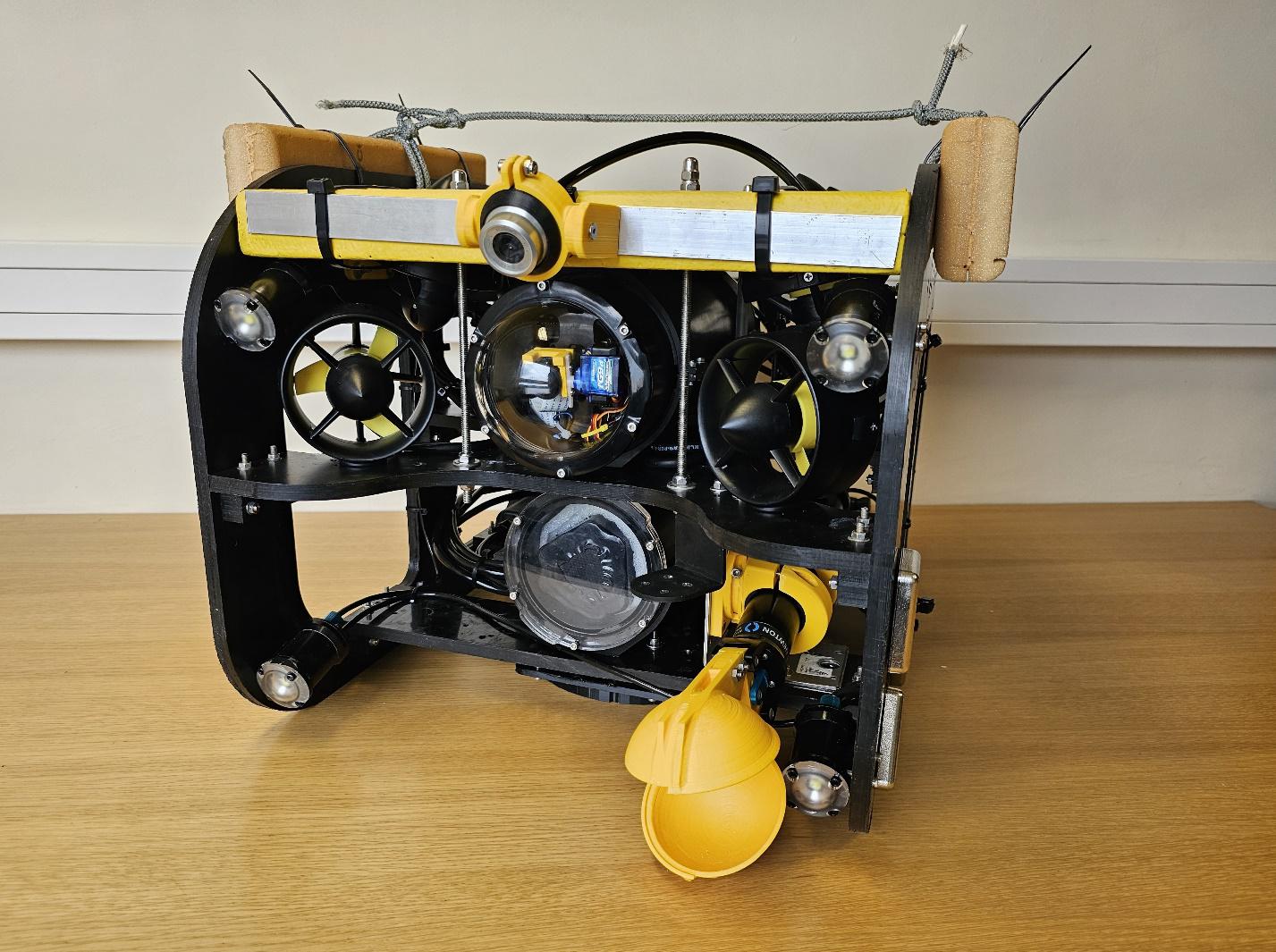
If you are interested in the SMAUG project, stay tuned since more SMAUG technologies will be revealed!
Until then, stay tuned with SMAUG via its social media pages!